
The paper "Press Start to Play: Classifying Multi-Robot Operators and Predicting Their Strategies through a Videogame" has been published by Robotics, an open access journal published by MDPI and obviously focused on robotics.
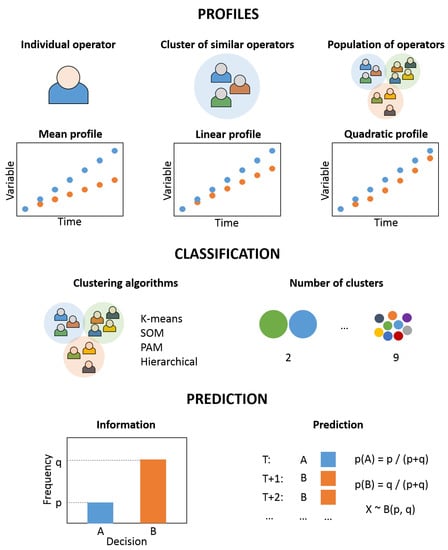
One of the active challenges in multi-robot missions is related to managing operator workload and situational awareness. Currently, the operators are trained to use interfaces, but in the near future this can be turned inside out: the interfaces will adapt to operators so as to facilitate their tasks. To this end, the interfaces should manage models of operators and adapt the information to their states and preferences. This work proposes a videogame-based approach to classify operator behavior and predict their actions in order to improve teleoperated multi-robot missions. First, groups of operators are generated according to their strategies by means of clustering algorithms. Second, the operators’ strategies are predicted, taking into account their models. Multiple information sources and modeling methods are used to determine the approach that maximizes the mission goal. The results demonstrate that predictions based on previous data from single operators increase the probability of success in teleoperated multi-robot missions by 19%, whereas predictions based on operator clusters increase this probability of success by 28%.
J11: J.J. Roldán, V. Díaz-Maroto, J. Real, P.R. Palafox, J. Valente, M. Garzón and A. Barrientos. Press start to play: classifying multi-robot operators and predicting their strategies through a videogame. Robotics, 8 (3), 53-67, 2019. Impact Factor (Scopus, 2018): 1.53, Q2. Article
No comments:
Post a Comment
Note: Only a member of this blog may post a comment.