
The thesis is supported by the Robotics and Cybernetics Research Group (RobCib) of the Centre for Automation and Robotics (CAR) and framed in the project SAVIER (Situational Awareness Virtual Environment) of Airbus Defence and Space.




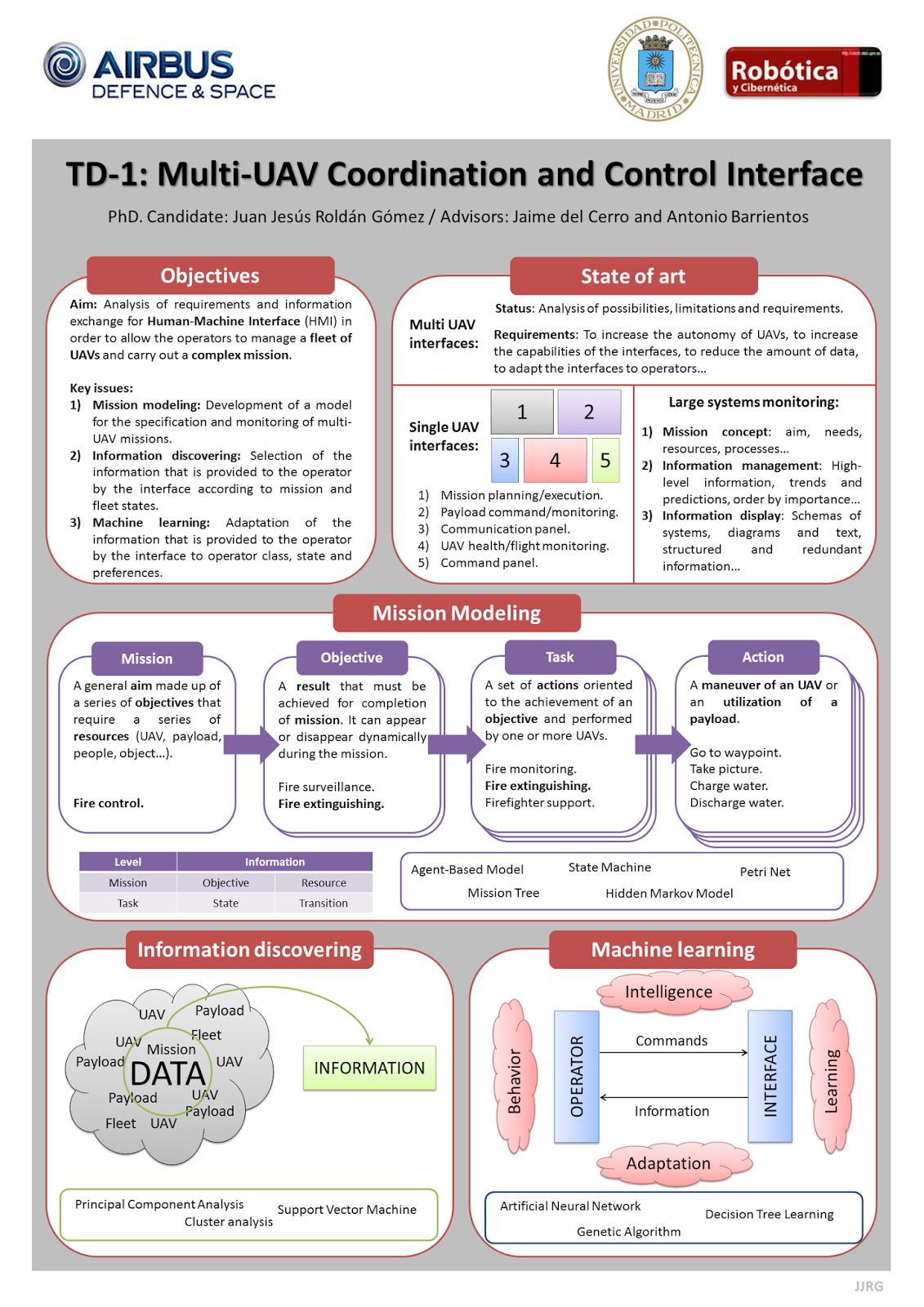
The pass from single-UAV to multi-UAV missions poses a set of challenges, such as to increase the autonomy of fleets and to reduce the workload of operators. This thesis aims to manage the information for a Human-Machine Interface (HMI) in order to allow a single operator to manage a fleet of UAVs and carry out a complex mission. Specifically, the thesis has the following objectives:
1) Mission modeling: Development of a model for the specification and monitoring of multi-UAV missions.
2) Information discovery: Selection of the information that is provided to the operator by the interface according to mission and fleet states.
3) Machine learning: Adaptation of the information that is provided to the operator by the interace to operator class, state and preferences.
* * *
La tesis está apoyada por el Grupo de Robótica y Cibernética (RobCib) del Centro de Automática y Robótica (CAR) y enmarcada en el proyecto SAVIER (Situational Awareness Virtual Environment) de Airbus Defence and Space.
El paso de misiones de un solo UAV a misiones con múltiples UAVs plantea una serie de retos, como incrementar la autonomía de las flotas y reducir la carga de trabajo de los operadores. Esta tesis busca gestionar la información en una Interfaz Humano-Máquina para permitir a un solo operador gestionar una flota de operadores y llevar a cabo una misión compleja. Específicamente, la tesis tiene los siguientes objetivos:
1) Modelado de misiones: Desarrollo de un modelo para la especificación y la monitorización de misiones multi-UAV.
2) Descubrimiento de información: Selección de la información que la interfaz proporciona al operador según los estados de la misión y la flota.
3) Aprendizaje automático: Adaptación de la información que la interfaz proporciona al operador a la clase, estado y preferencias del mismo.
Poster 2014:
Poster 2015:

Poster 2016:

Poster 2017:

No comments:
Post a Comment
Note: Only a member of this blog may post a comment.